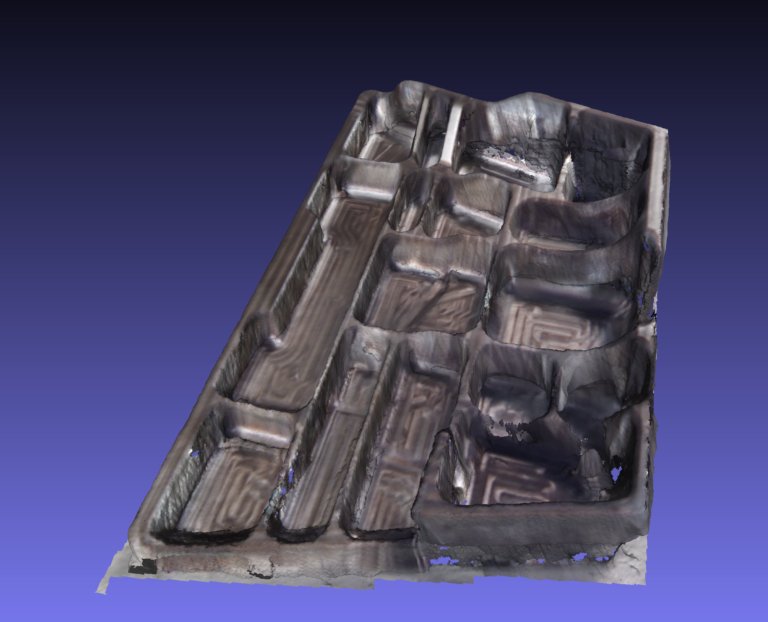
Mesh reconstruction is often a critical step in an industrial robotics application. CAD models are not always readily available for all parts and often parts have warped or changed due to frequent use in the field. Reconstruction allows a robotic system to get mesh information in these scenarios. Once a mesh has been generated software can be used to generate toolpaths for the robot either autonomously or with human input. These toolpaths can then be converted into robot trajectories which are subsequently executed.
https://rosindustrial.org/news/2022/6/3/announcing-open3d-industrial-reconstruction