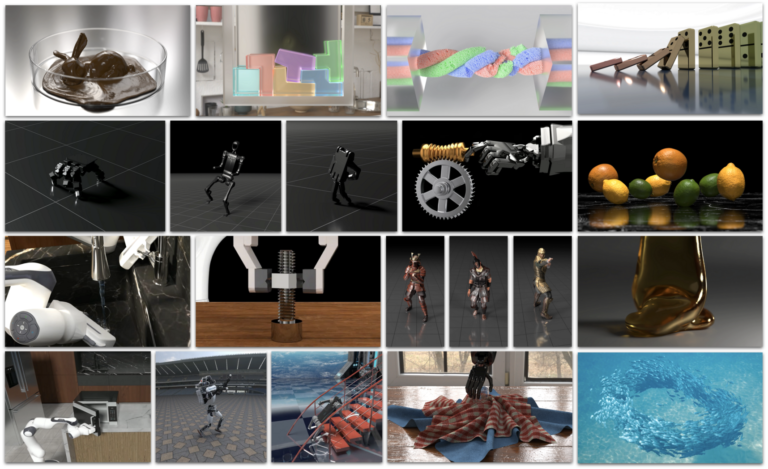

Genesis is a physics platform designed for general purpose Robotics/Embodied AI/Physical AI applications. It is simultaneously multiple things:
- A universal physics engine re-built from the ground up, capable of simulating a wide range of materials and physical phenomena.
- A lightweight, ultra-fast, pythonic, and user-friendly robotics simulation platform.
- A powerful and fast photo-realistic rendering system.
- A generative data engine that transforms user-prompted natural language description into various modalities of data.
Powered by a universal physics engine re-designed and re-built from the ground up, Genesis integrates various physics solvers and their coupling into a unified framework. This core physics engine is further enhanced by a generative agent framework that operates at an upper level, aiming towards fully automated data generation for robotics and beyond. Currently, we are open-sourcing the underlying physics engine and the simulation platform. The generative framework will be released in the near future.